









实施背景
按照智能矿山建设规划:智能采矿以单体设备无人操控、自主运行为目标。在井下通讯平台搭建的基础上,抓住当前物联网、大数据、云计算、虚拟现实、区块链、5G等为代表的现代信息技术快速发展的有利时机,以采区单体设备为突破点,研究、实施关键设备远程遥控、自动驾驶,为地采智能矿山建设提供标杆,提升国内地采矿山行业影响力。

采场作业设备中,负责回采甩矿的电动铲运机处于核心地位,是矿山采矿能力的标尺,其自动化水平,具有很强的可复制性和推广性;同时因其工作环境差、生产任务重等因素,急需将岗位人员解放出来,践行地采矿山“无人则安、少人则安”的本质安全理念,提出对铲运机进行远程遥控改造的研究。
建设目标
该项目建设目标是对甩矿作业的电动铲运机实施远程控制改造,解决日益增加生产任务与现场环境的矛盾。
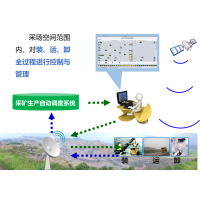
系统组成及架构
铲运机视频模块
视频系统是遥控驾驶中关键环节,操作人员了解现场情况的唯一途径,该系统使用高清车载摄像机等设备实现该功能。

铲运机铲矿画面
铲运机雷达防碰撞模块
激光雷达、超声波雷达与域控制器配合完成防碰撞功能。在铲运机的边沿位置安装激光雷达,实现该功能。
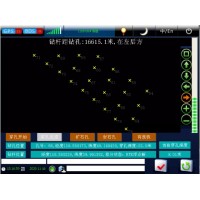
铲运机遥控驾驶定位模块
通过定位模块确定铲运机实时位置,便于远程直观操作。
铲运机遥控驾驶车载控制箱
车载控制箱负责采集铲运机本体的运行状态信息、控制各操作指令的输出 以及与远程操作台之间的数据交换。车载控制单元控制铲运机的铲斗、大臂、左右转向、运行方向等动作,同时对铲运机状态进行监测,采集系统信息,做出智能判断辅助驾驶员操作;
手持遥控模块
手持遥控模块包括手持遥控终端和遥控接收终端,可实现视距遥控。
通信传输模块
通讯传输承担了遥控操作平台与设备之间的所有通信任务,包括操作平台对设备的控制通信、设备状态信息上传到操作平台状态监视器的通信、视频系统上传到操作平台视频监视器的通信。
远程遥控操作平台
遥控操作台作为整个系统的展示平台,遥控操作台主要完成对所有手柄和开关数据的采集、铲运机视频、铲运机运转数据的显示、进行道路信息的导航显示等功能。座椅采用六位可调座椅,提高操作人员的舒适性。
应用效果效益
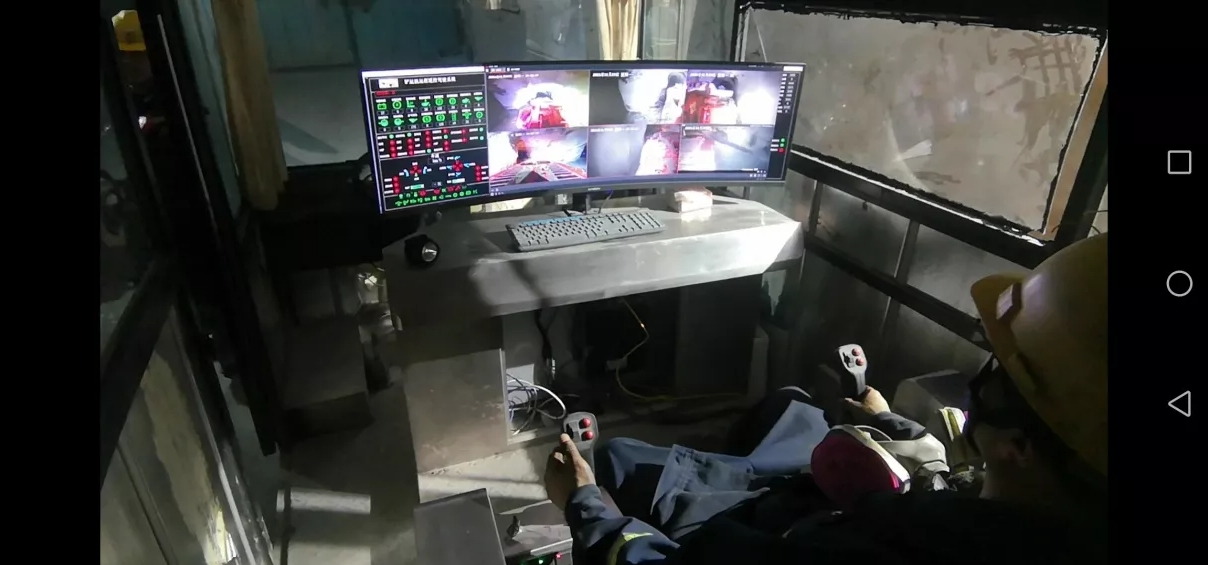
铲运机远程遥控系统实际使用图
系统稳定、反应速度快、精准度高,能够满足现场的各种生产条件。驾驶员经过培训后,远程操作效率达到81%,后续熟练后效率会进一步提高。
将铲运机由井下现场操控改为远程遥控,减少井下现场作业人员4人,消除开车过程中颠簸,远离粉尘、有毒有害气体等,减少职业病罹患风险,降低操作人员面临顶板冒落危险的几率,提高本质化安全水平。